Description
🤖 Project Overview
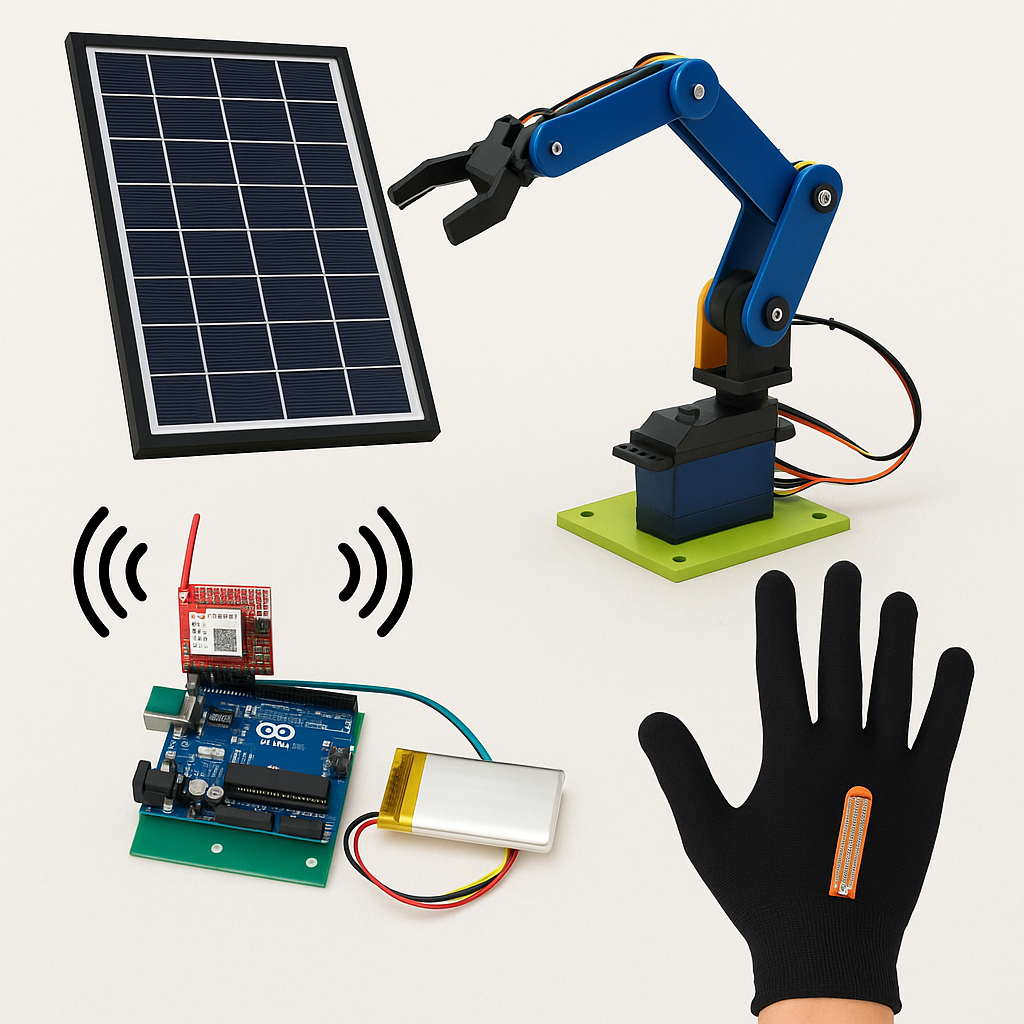
The Solar-Based Pick and Place Robot using Hand Motion Control is an innovative mechatronics project that merges robotics, renewable energy, and gesture technology into a single system.
This project uses a solar panel as the primary power source to charge a battery, which powers an Arduino-controlled robotic arm. The arm mimics the motion of a user’s hand in real time, detected by gesture sensors (MPU6050 or flex sensors) on a glove.
The system demonstrates the potential of eco-friendly robotic systems, showcasing how automation and renewable energy can work together. It’s an ideal project for students to learn embedded systems, control mechanics, power electronics, and sensor communication.
⚙️ How It Works
-
Gesture Detection: A wearable glove fitted with sensors like the MPU6050 IMU or flex sensors detects hand motion or finger bending.
-
Wireless Transmission: The sensor data is sent wirelessly (via nRF24L01 or Bluetooth HC-05 module) to the robot controller.
-
Motion Mapping: The Arduino Uno processes the data and converts the motion values into servo or DC motor angles.
-
Mechanical Operation: The robot arm replicates the user’s hand gestures — rotating its base, moving its joints, and gripping or releasing objects.
-
Solar Power Integration: A solar panel charges a 12V battery, which powers the robot, making it independent from external power sources.
This gesture-controlled solar robot demonstrates human–machine interaction, sustainability, and automation in one compact system.
🔩 Key Features
-
Hand Motion Control: Real-time gesture recognition using MPU6050 or flex sensors.
-
Wireless Operation: Communicates via Bluetooth or RF transceivers for untethered control.
-
Solar-Powered: Operates on renewable solar energy for continuous and eco-friendly performance.
-
Multi-DOF Arm: 3–4 degrees of freedom with gripper mechanism for object manipulation.
-
Arduino-Based Control: Simple and reliable embedded control system.
-
Educational Design: Designed for engineering students and robotics learners.
🧰 Technical Specifications
| Parameter | Description |
|---|---|
| Controller | Arduino Uno / Nano |
| Sensors | MPU6050 / Flex Sensors |
| Communication | Bluetooth (HC-05) / RF (nRF24L01) |
| Motors | MG996R High Torque Servos / DC Gear Motors |
| Power Source | 12V Solar Panel + Battery |
| Charge Control | 12V Solar Charge Controller |
| Working Range | Up to 10 meters (wireless) |
| Robot Arm | 3–4 DOF with Gripper |
| Rotation | Base 0°–180°, Shoulder 0°–120°, Elbow 0°–135° |
| Frame Material | Aluminum / Acrylic / PLA |
| Automation Type | Wireless Hand Gesture Controlled rf module |
🎓 Educational Outcomes
Students will learn:
-
Gesture detection using MPU6050 or flex sensors
-
Wireless data transmission between microcontrollers
-
Servo control and robotic motion mapping
-
Solar energy integration in electronics
-
Renewable energy–based automation design
-
Embedded control, mechanical actuation, and real-time systems
This project provides practical exposure to robotics, power systems, and IoT-inspired automation, making it perfect for final-year projects, workshops, and robotics competitions.
💡 Applications
-
Industrial pick-and-place automation
-
Solar-powered robotics research
-
Remote warehouse and factory assistance
-
Educational demonstration for renewable energy systems
-
Human–machine interaction study models
🧩 Advantages
-
Combines solar power and automation for sustainability
-
Completely wireless hand gesture control
-
Low maintenance and portable
-
Demonstrates multiple engineering disciplines (Mechanical, Electrical, ECE, Mechatronics)
-
Highly interactive and engaging for project exhibitions
-
Operates independently with no external power source required
📦 Package Includes
-
Arduino Uno + Nano boards
-
MPU6050 / Flex Sensor Glove Assembly
-
Wireless Modules (HC-05 / nRF24L01)
-
High Torque Servos / DC Gear Motors
-
12V Solar Panel + Charge Controller
-
Battery & Power Distribution Circuit
-
Acrylic / Aluminum Arm Structure with Gripper
-
Documentation (Word + PDF) + User Manual
-
Working Principle Diagram + Block Diagram Image






Reviews
There are no reviews yet.